














Das ewige Pendel
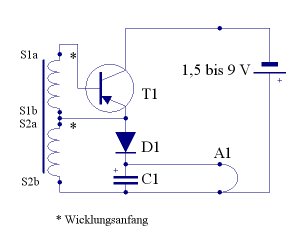
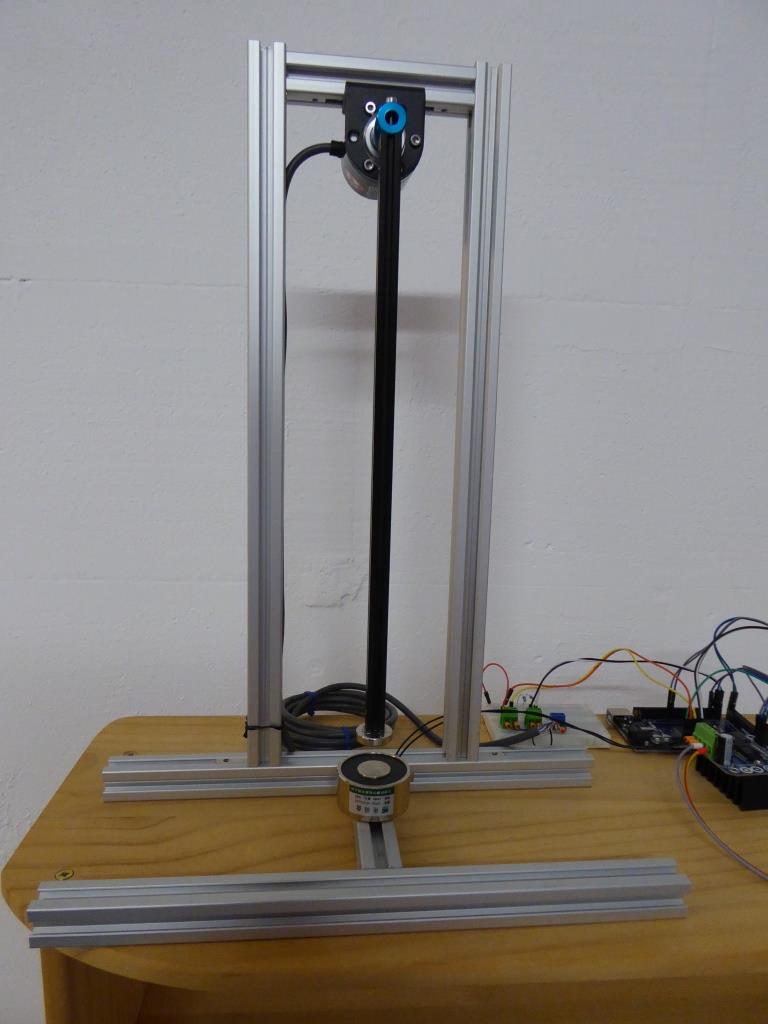
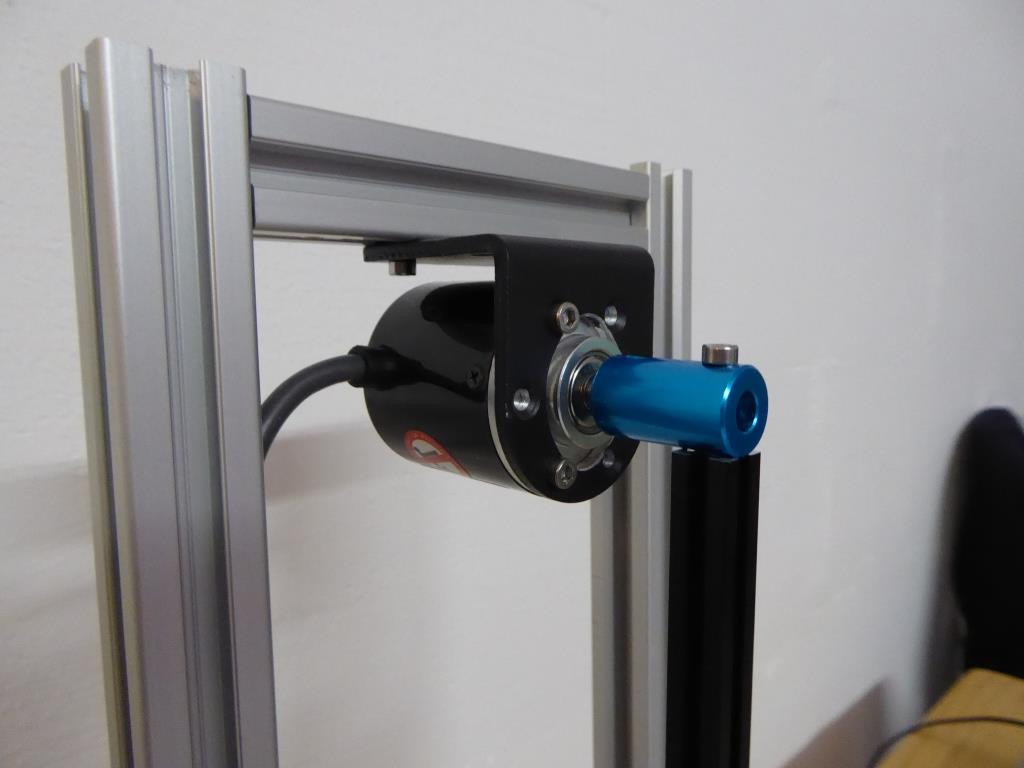
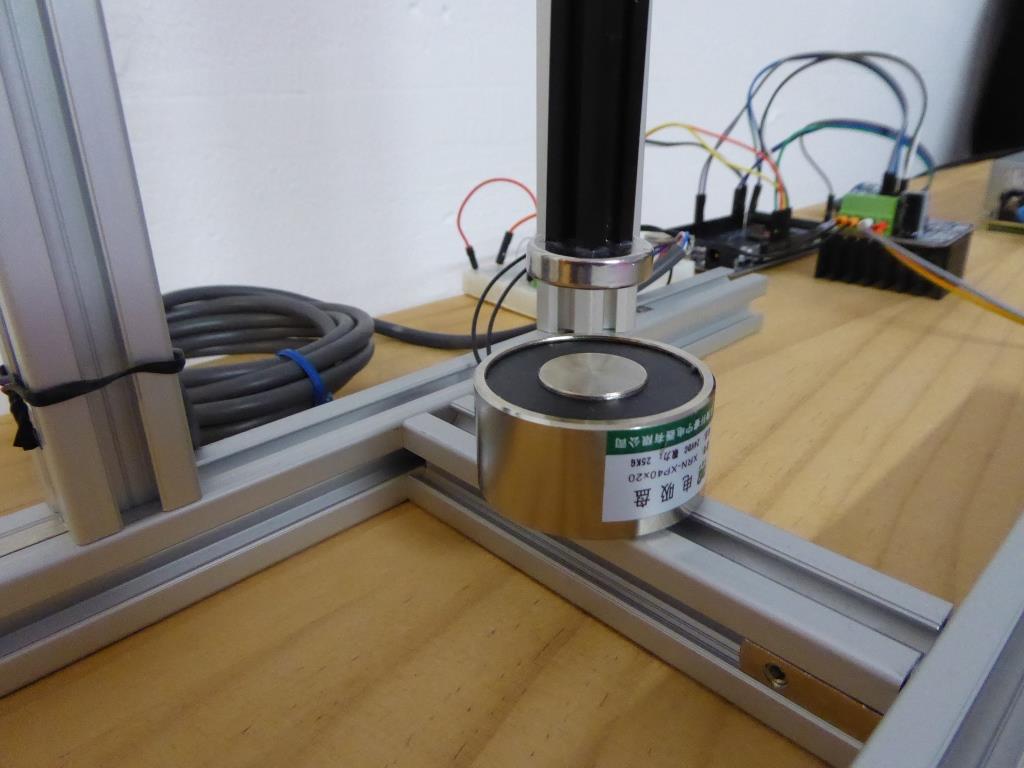
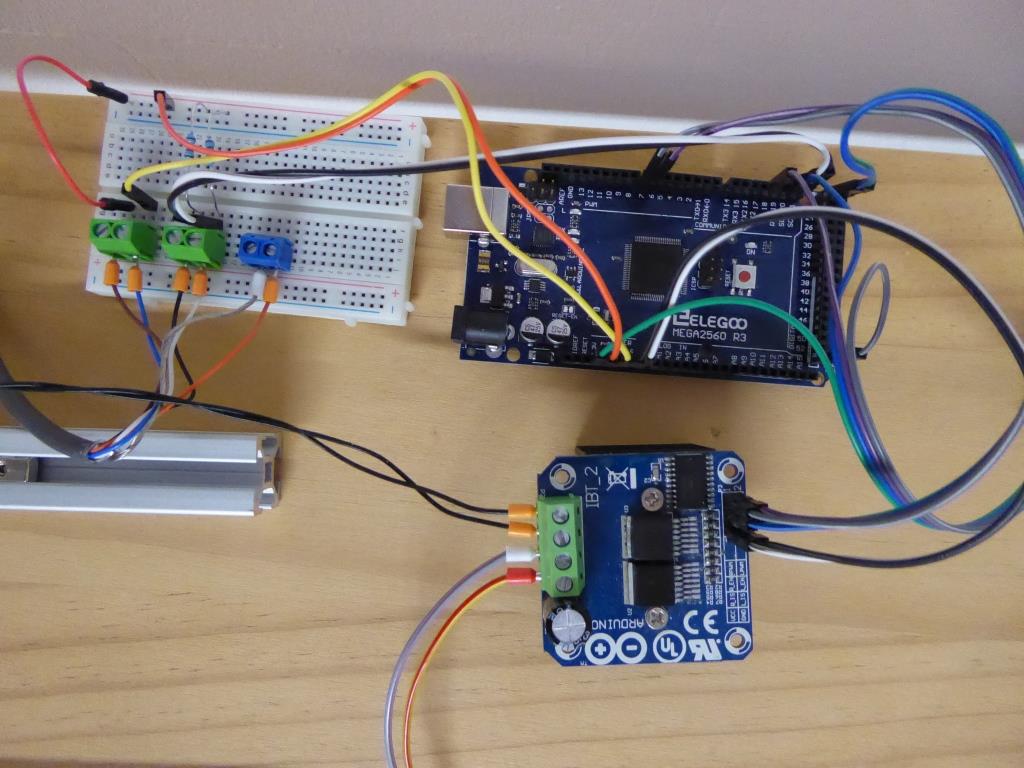
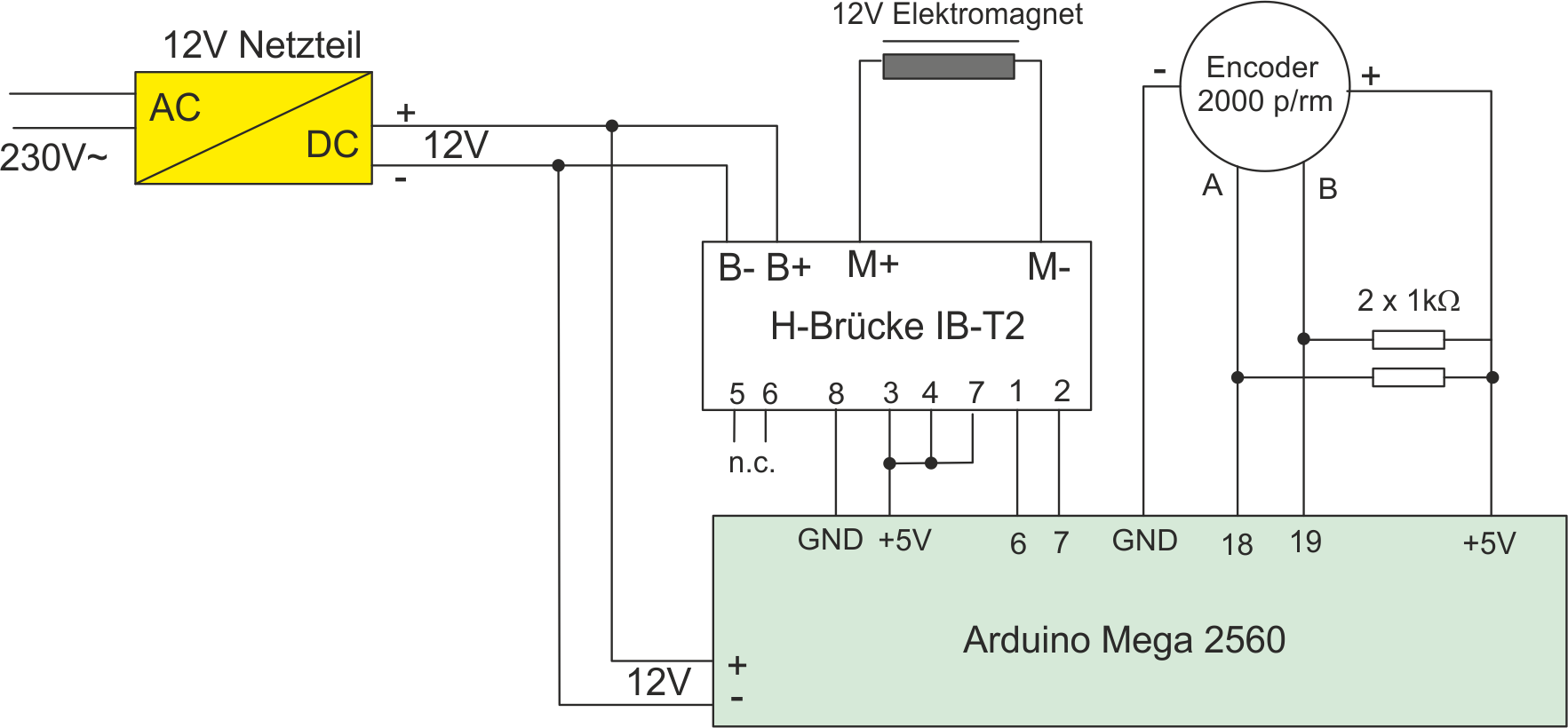
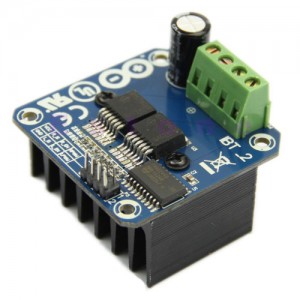
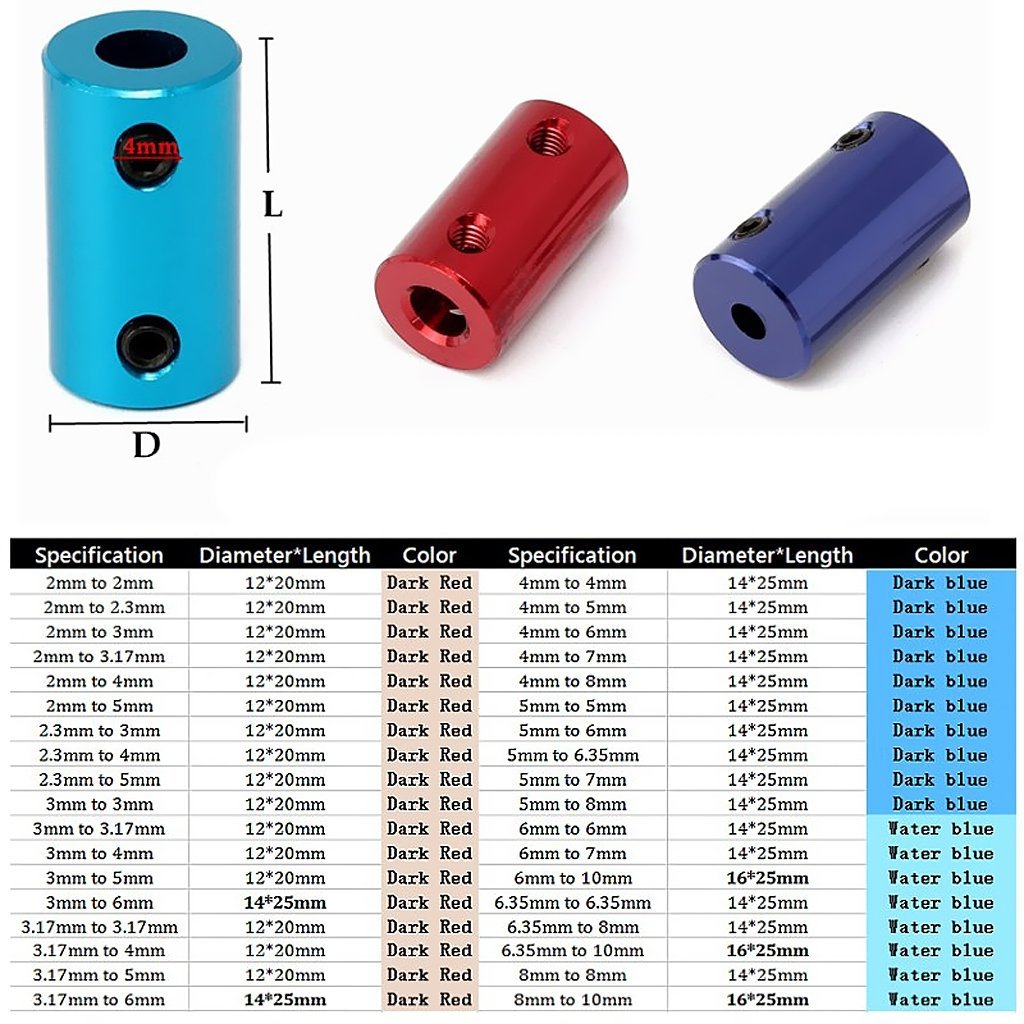
In diesem Projekt wird ein Pendel mit Hilfe eines Elektromagneten zu einer dauerhaften Schwingung angeregt. In Geschenkartikelläden findet man solche Konstruktionen in diversen Ausfertigungen als Tischdeko. Dort wird das Pendel über eine Transistorschaltung angetrieben, wie das Beispiel zeigt. Wir wollen etwas mehr Aufwand treiben und einen Arduino die Steuerung des Elektromagneten übertragen. Den Pendelwinkel erfassen wir mit Hilfe eines Winkelgebers (Encoder). Die Funktionsweise ist im Beitrag inverses Pendel näher erläutert. In Abhängigkeit vom Pendelwinkel bzw. der Winkelgeschwindigkeit steuern wir den Strom im Elektromagneten. Dabei nutzen wir sowohl das anziehende- als auch das abstoßende Moment. Der Elektromagnet wird mit Hilfe einer H-Brücke in der Polarität ständig gedreht. Als mechanisches Grundgerüst benutzen wir ALU Profile 20 B-Typ Nut 6. Den Encoder befestigen wir mit Hilfe eines Motorwinkels am ALU Profil. Der Pendelstab besteht aus einem 10x10x300 Makerbeam ALU Profil. Am Ende befestigen wir mit Zwei- Komponenten Kleber einen Neodym Scheibenmagnet der Größe 20x5 mm. Zur Stromversorgung kann ein 12V Schaltnetzteil oder Steckernetzteil verwendet werden.
Das Programmbeispiel steuert das Pendel in fünf verschiedenen Phasen: Beschleunigen, Abbremsen, Chaosbetrieb, rechts Wippen, links Wippen. Für jede Phase wurde eine Dauer von 20 Sekunden gesetzt. Die fünf Phasen sollen eine Anregung geben sich weitere Programmschritte zu überlegen bzw. die Bestehenden noch zu optimieren. Wie kann der maximale Pendelausschlag erzielt werden? Wie kann das Pendel am schnellsten zum Stillstand gebremst werden? Nach dem Laden des Programms schwingt das Pendel von alleine an. Immer wenn sich das Pendel abwärts auf den Magneten zu bewegt polen wir den Magnet auf Anziehungskraft. Sobald der untere Totpunkt durchlaufen ist polen wir auf abstoßende Kraft um. So wird das Pendel zur Schwingung gebracht. Beim Chaosbetrieb wird die Magnetkraft mittels Zufallswerten fortlaufend geändert (abstoßend und anziehend) was zu einer vollkommen unregelmäßigen Pendelschwingung führt. Ein rechts. bzw. linksseitiges Wippen erreicht man durch permanentes Abstoßen links bzw. rechts vom unteren Totpunkt.
|










Copyright (c) 2004, Ingmar Rubin, Alle Rechte vorbehalten.