














Aufbau eines inversen Pendels mit Linearführung
|
Das inverse Pendel ist ein beliebtes Studienobjekt in den Ingenieurwissenschaften Regelungstechnik, Elektrotechnik und Maschinenbau. Dabei soll ein frei schwingendes Pendel senkrecht nach oben balanciert werden, ähnlich dem Balancieren eines Bleistiftes auf dem Finger. Das Pendel ist an einem beweglichen Wagen befestigt, der die nötigen Ausgleichbewegungen durchführt.
Bild 1: Grundprinzip eines inversen Pendels ZielsetzungEs soll unter den Bedingungen eines Hobby Makers ein inverses Pendel aufgebaut werden. Die Kosten der Einzelteile liegen in Summe bei 150. Für die Montage werden keine Spezialwerkzeuge oder Maschinen wie Fräse, 3D Drucker oder Drehbank benötigt. An Werkzeugen sollte vorhanden sein: Bohrmaschine, Gewindebohrer, Feile und ein Satz Schraubendreher bzw. Bits. Die Materialien sind sämtlich über das Internet (Ebay, Amazon, usw.) bestell bar bzw. auf Baumärkten erhältlich. Als elektronische Steuerung wird ein Arduino Megaboard benutzt. Ein paar Grundkenntnisse in der Programmierung des Arduino werden vorausgesetzt. Als Einstieg in die Welt des Arduino Mikrokontrollers sei der Baukasten von Elegoo empfohlen, der gleich das Arduino Mega Board enthält. Im folgenden Erfahrungsbericht sind alle benötigten Einzelteile aufgezählt. Es wurde auf ein möglichst einfachen und stabilen Aufbau Wert gelegt, so dass ein stabiles Regelungsverhalten erzielt wird. Dateien
Stromlaufplan mit DC Motor
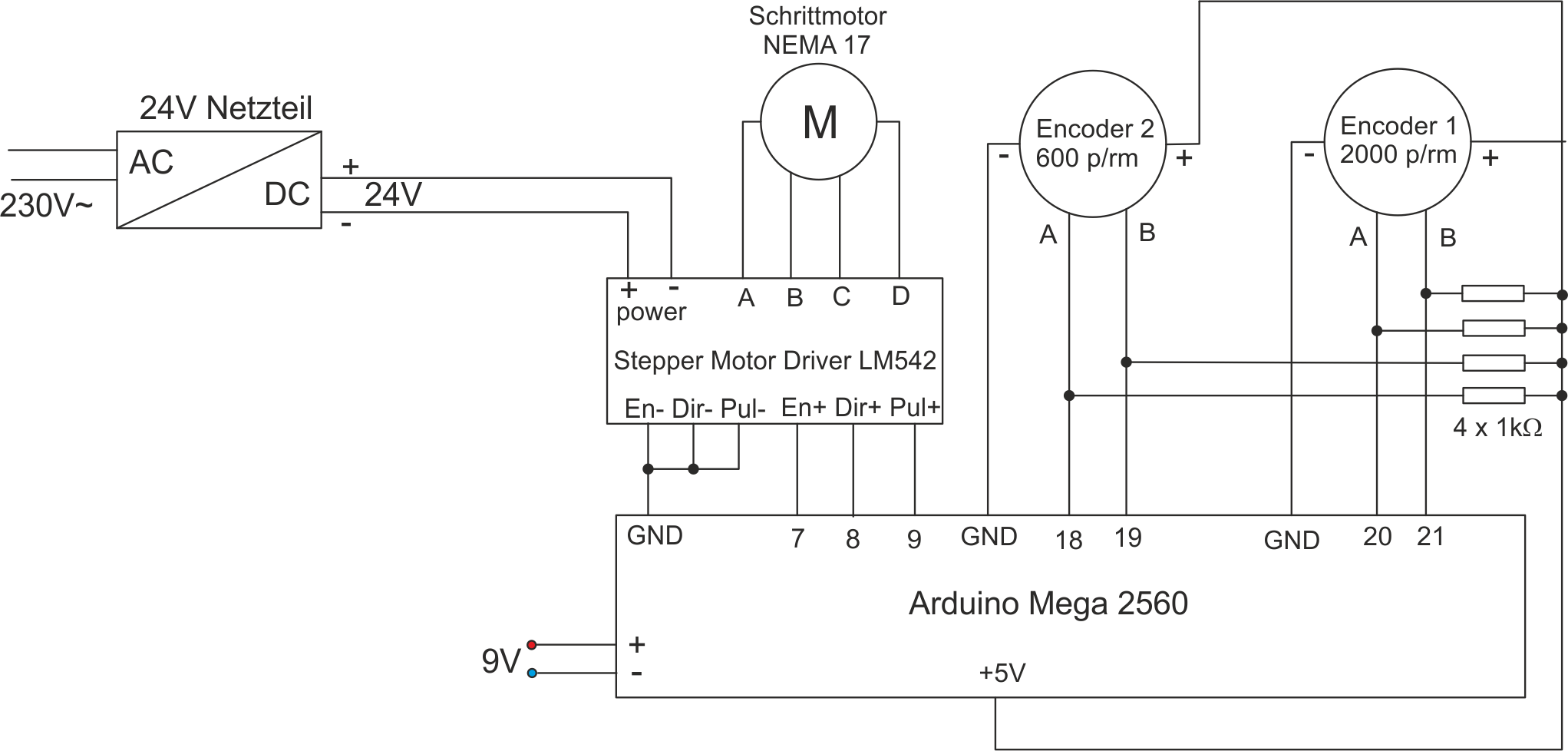
Stromlaufplan mit Schrittmotor
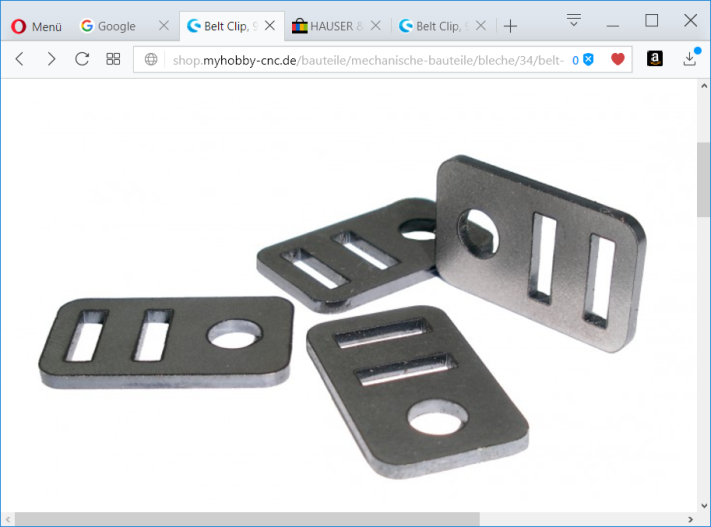
Bilder und Links zu den Einzelteilen
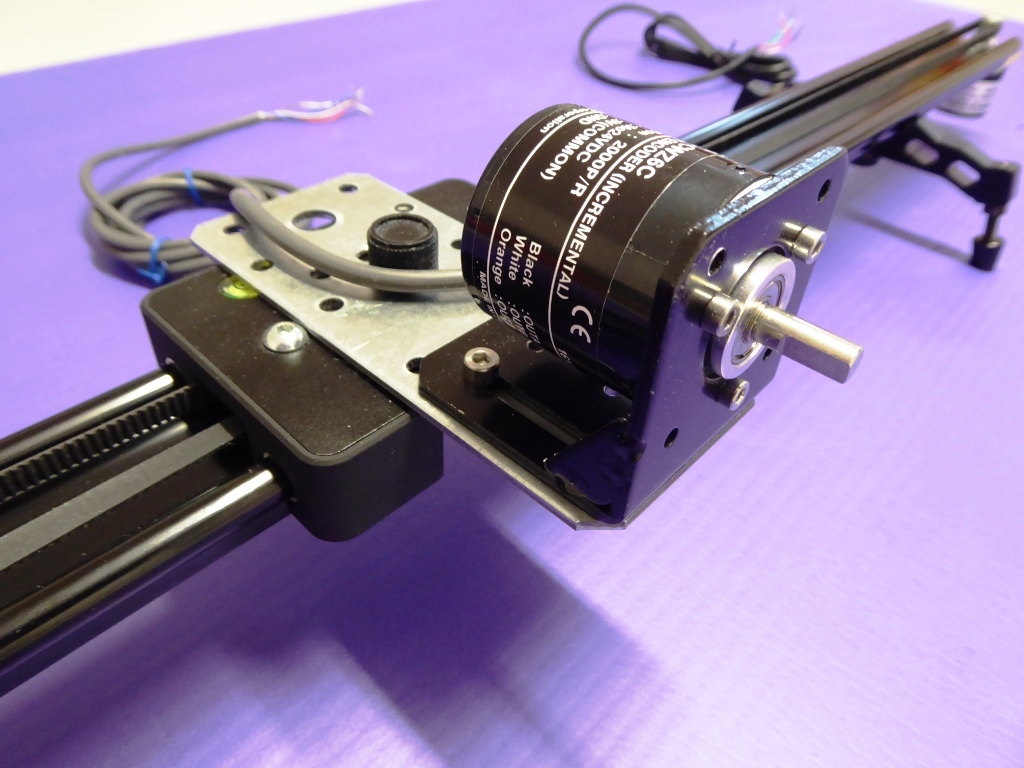
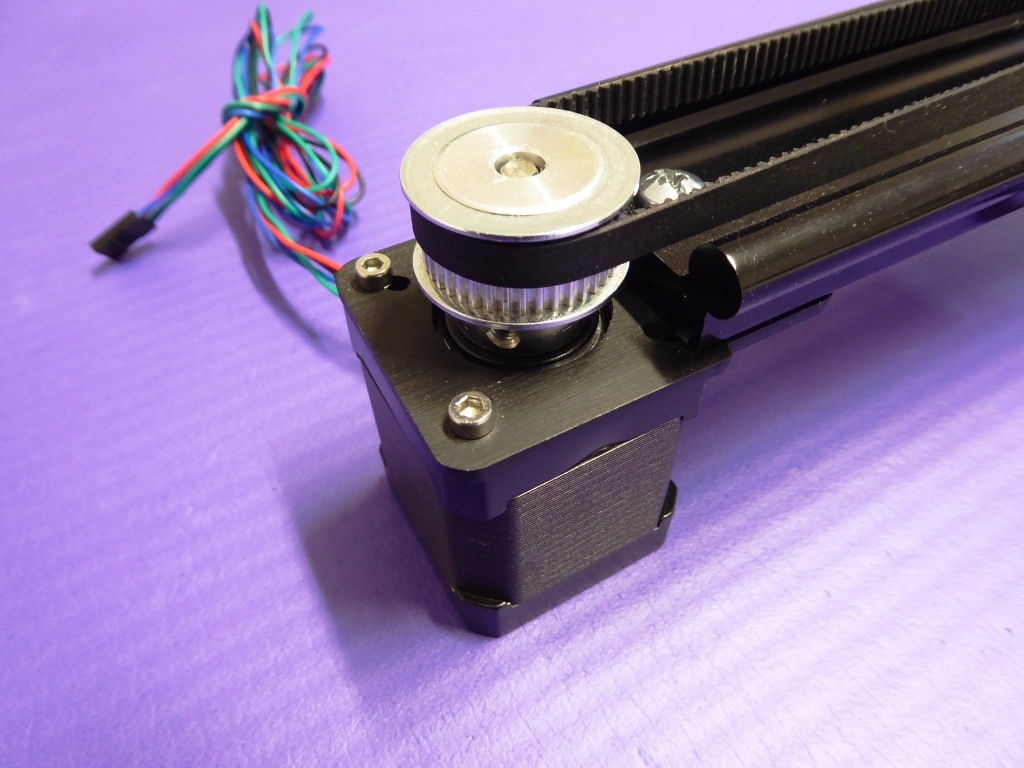
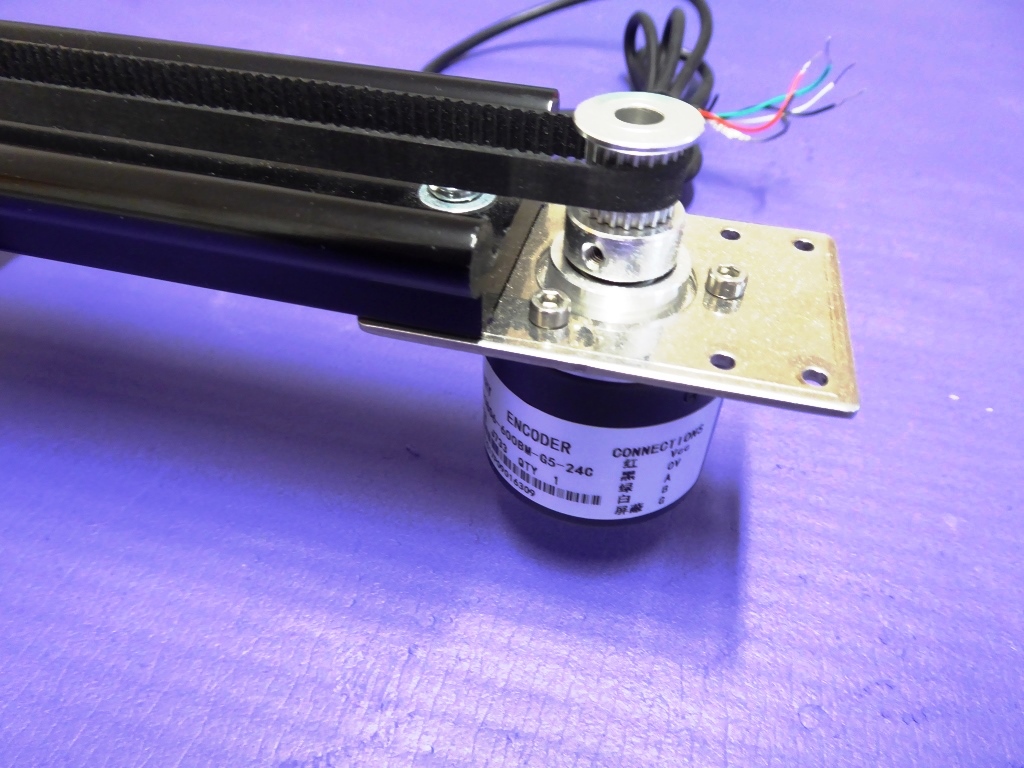
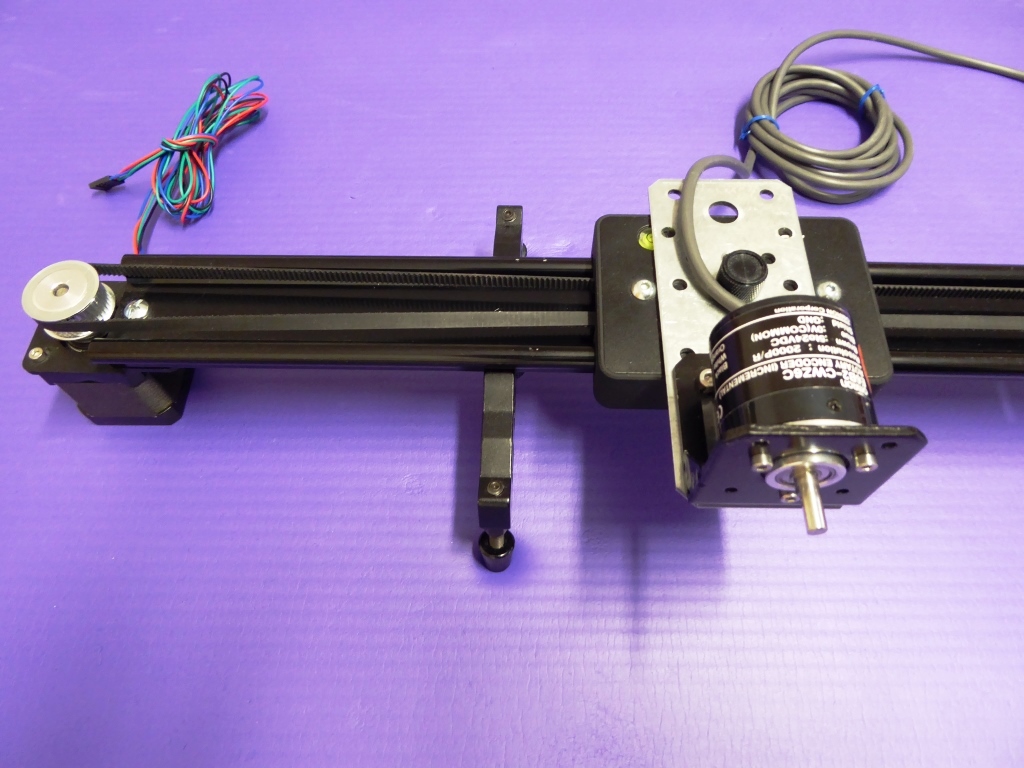
Mechanischer Aufbau
Kameraschiene mit Schlitten, Schrittmotor und Encoder an den Enden
InbetriebnahmeNach dem Laden des Programms und dem Einschalten der Stromversorgung für den Motor, muss das Pendel absolut ruhig und senkrecht nach unten hängen. Jetzt wird kurz die rote Resettaste auf dem Arduinobord betätigt. Damit wird der Encodercounter mit dem Referenzwert -4000 geladen (eine volle Umdrehung sind 8000 Impulse, da die Endcoderbibliothek die 2000 Impulse vervierfacht (Auswertung der steigenden und fallenden Signalflanken). Danach bringt man das Pendel im Uhrzeigersinn in die aufrechte Position. Der Regler beginnt zu arbeiten und sollte das Pendel jetzt aufrecht halten. Sollte der Schlitten stets in die falsche Richtung steuern, müssen die Motoranschlüsse an der H-Brücke bzw. Schrittmotoranschlüsse am Drivermodul getauscht werden. Weiterhin müssen die PI Reglerparameter Kp und Ki abgeglichen werden (leicht absenken oder erhöhen). Der Schlitten kann um ca. +/- 20cm hin- und her fahren. Sollte der Schlitten permanent in eine Richtung abdriften muss die waagerechte Lage der Kameraschiene an den Standfüssen justiert werden. Zur Kontrolle der Reglerausgabe kann der seriellen Plotter in der Arduino Box am PC geöffnet werden. Dort wir fortlaufend die Stellgröße des Reglers ausgeben Ist der Kp Wert zu hoch eingestellt schwingt sich der Regler auf und die Stellgröße schwankt innerhalb der maximalen Grenze von +/- 250. |
















Copyright (c) 2004, Ingmar Rubin, Alle Rechte vorbehalten.